Схема работы посадочной системы на втором этапе (вдув газа в надпоршневой объем цилиндра) представлена на рис. 2.

Рис.2. Характерная траектория посадочной системы на втором этапе торможения в координатах "высота — время": 1 — груз; 2 — цилиндр; 3 — поршень; 4 — шток; 5 — парашют
При этом система условно разделяется на две части: цилиндр с грузом и поршень со штоком и парашютом массами m1 и m2 (m = m1 + m2), а уравнения движения можно записать в виде:
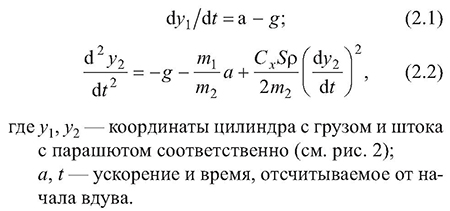
Полагая, что давление в надпоршевом объеме рк, получаем выражение для оценки ускорения а:
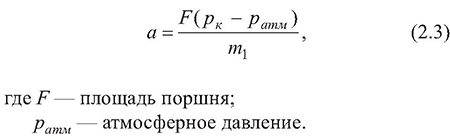
Нетрудно видеть, что вдув газа может быть организован таким образом, что a = const. При этом дифференциальные уравнения (2.1) и (2.2) имеют аналитические решения:
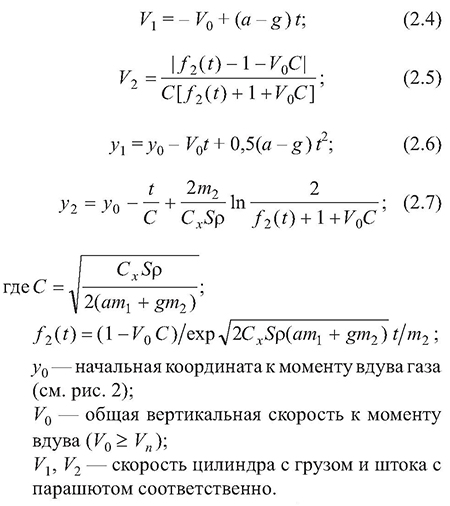
Длительность второго этапа (от момента начала вдува до его окончания) определяется полным выдвижением штока на величину L (см. рис. 2). Полагая, что момент окончания второго этапа совпал с касанием штоком поверхности, получаем:
Поскольку уравнение (2.8) трансцендентное, величина определяется из него численными методами или графически.
Закон изменения расхода газа, вдуваемого в надпоршневой объем (процесс полагается изотермическим — газ вдувается при постоянной температуре Т), можно описать выражением:
Торможение на третьем этапе
На этапе штокового торможения (рис. 2, в; 3) npoucxoдum равнозамедленное спускание цилиндра с грузом с ускорением, как и ранее, а. Тогда справедливо соотношение:

Рис.3. Характерная траектория посадочной системы на третьем этапе торможения в координатах "высота — время"
Следует иметь ввиду, что если параметры посадочной системы выбраны так, что в конце второго этапа гасится вся скорость, то третий этап торможения может и не потребоваться — он сведется к тому, что цилиндр с грузом мягко опустится на поверхность. Третий этап также не будет иметь место, если груз приводняется.
Задачи анализа и синтеза
Используя полученные выражения, можно решать задачи анализа и синтеза посадочной системы. В первом случае по заданным параметрам системы (например, L, F и рк) оцениваются ее важнейшие характеристики — перегрузка, скорость контакта VK, а также высота y0, необходимая для срабатывания тормозного блока. Во втором случае по заданной допустимой скорости контакта и перегрузке оцениваются необходимые величины длины штока L, давления в камере рк и площади поршня F. В том и другом случаях в качестве исходных данных используются параметры атмосферы и парашюта, массы m1 и m2, скорость V0 на момент начала 2-го этапа торможения.

Рис.4. Зависимости параметров и характеристик посадочной системы от хода штока L: а — скорость; б — время; в — начальная высота второго этапа торможения; г — требуемая масса газа
В качестве примера были проведены расчеты для посадочной системы, когда масса груза (с цилиндром) составляла 10 тонн (m1 = 10000 кг), масса парашюта со штоком m2 = 50 кг, площадь поршня F = 0,53 м2, CxS = 200 м2 и RT = 150 кДж/кг. На рис. 4 приведены зависимости скоростей V0 и VK, массы газа m2 и оптимальной высоты начала торможения y0 от длины хода штока L.
Например, если длина хода штока составит ~ 4 м, а высота начала торможения y0 = 5 м, то груз в конце третьего этапа совершит мягкую посадку и будет израсходовано ~ 23 кг газа. А если длина хода штока составит ~ 24 м и высота начала торможения будет ~ 30 м, то третьего этапа может и не потребоваться — скорость падения груза будет компенсирована уже в конце второго этапа торможения и израсходуется ~ 170 кг газа.
Выводы
Таким образом, предлагаемая посадочная система способна обеспечивать мягкую посадку грузов и людей при ограниченной площади парашюта, имея при этом приемлемые массо-габаритные характеристики. Это делает возможным ее применение для десантирования сил и средств пожарной охраны или других оперативных служб в отдаленных или горных районах, а также в местностях с неразвитой или разрушенной инфраструктурой.